Motori asincroni
Teoria del motore asincrono
Il motore asincrono è un tipo di motore elettrico in corrente alternata in cui la frequenza di rotazione non risulta uguale ma inferiore alla frequenza di rete, ovvero non è “sincrono” con essa, da qui l’origine del nome. Per effetto dell’alimentazione del circuito di statore, si produce un campo magnetico rotante avente una velocità (velocità di sincronismo n0) legata alla frequenza della rete di alimentazione. Il rotore, chiuso in cortocircuito e sottoposto al campo magnetico di statore, è sede di una forza elettromotrice indotta che genera delle correnti il cui effetto è quello di creare una coppia motrice che porta in rotazione il rotore al fine di opporsi alla causa che ha generato il fenomeno. Il rotore così accelera tendendo idealmente alla velocità di sincronismo a cui corrisponderebbe una coppia motrice nulla generando così una situazione di instabilità per il motore. In pratica però il rotore raggiunge una velocità inferiore (concetto dello scorrimento, come differenza di velocità tra campo magnetico statorico e velocità del rotore) tale per cui a vuoto (senza carico esterno collegato all’albero motore) la coppia motrice eguaglia le coppie d’attrito e ventilazione, mentre a carico la coppia motrice eguaglia la somma delle coppie precedenti e di quella resistente applicata all’albero. Come detto in precedenza, la velocità alla quale il motore non produce coppia è detta velocità di sincronismo. Essa è legata alla frequenza di alimentazione e al numero di coppie polari dalla relazione:
n0 = 60 x f
dove
n0 = velocità di sincronismo in giri al minuto
f = frequenza della rete di alimentazione
p = numero di coppie polari (le coppie polari si determinano dividendo per due numero di poli che caratterizza il motore).
Nel funzionamento normale il rotore (e quindi l’albero motore ad esso solidale) presenta una velocità inferiore a quella di sincronismo. Anche nel funzionamento a vuoto, cioè senza carico connesso, non si raggiunge la velocità di sincronismo per le perdite intrinseche del motore legate ad esempio all’attrito sui cuscinetti che sostengono l’albero e che offrono quindi una piccola coppia resistente. Dalla diversità tra la velocità di rotazione del rotore “n” e del campo magnetico di statore “n0“, si può definire una velocità relativa “ns” esprimibile come ns = n0 – n e definita più propriamente come velocità di scorrimento.
Da cui lo scorrimento “s” è definito come s = (n0 – n) / n0 e può assumere tutti i valori compresi tra i valori limite 0 e 1 in base alle condizioni di funzionamento e più precisamente:
n = 0 rotore fermo quindi s = 1 (rotore bloccato)
n = n0 rotore con velocità di sincronismo quindi s = 0 (condizione come già visto solo teorica)
A livello indicativo si può ritenere che lo scorrimento che caratterizza i motori asincroni nel loro funzionamento a pieno carico abbia valori compresi tra il 3% e il 7% dove i valori inferiori sono tipici dei motori di potenza elevata.
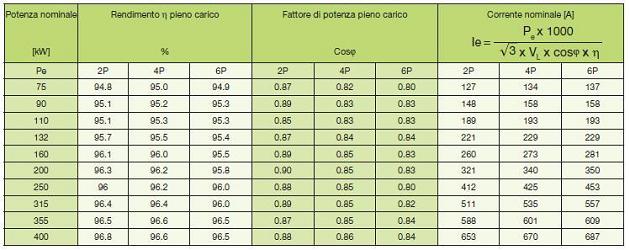
Nella tabella seguente riportiamo per alcune potenze un esempio dei valori tipici che possono assumere a 415Vac il rendimento, il fattore di potenza e la corrente nominale per le più comuni tipologie di motori asincroni trifase aventi diverso numero di poli.